uStepper Basic Rev B Hohlstecker
Closed-Loop Schrittmotor-Treiber
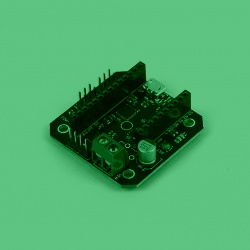
Der uStepper vereint Schrittmotor-Treiber, Winkelencoder und einen ATmega328P Mikrocontroller in einem kompakten PCB. Die Einheit kann mit Hilfe von Magneten einfach an einem Nema 17 (41,8 mm x 41,8 mm) Schrittmotor befestigt werden. Die Position des Rotors wird mit Hilfe eines Halleffekt-basierten Drehgebers ausgelesen. Dazu muss der mitgelieferte Magnet auf die Welle geklebt werden. Der ATmega328P Mikrocontroller ist Arduino kompatibel und kann, nach Installation des Boards, auch über die Arduino-IDE programmiert werden.
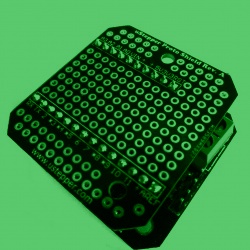
Durch Kombination von Schrittmotortreiber und Winkelencoder kann ein standard Schrittmotor somit zu einem Closed-Loop-System erweitert werden, welches selbstständig Soll-Ist-Positionsabweichungen detektiert und nachregelt. Da der Motorstrom per Software zur Laufzeit angepasst werden kann, sind auch Anwendungen mit dynamisch veränderlichem Drehmoment realisierbar. Ein eingebauter Temperatursensor kann zudem zur Überwachung des Schrittmotortreibers verwendet werden, um Überlastungen zu detektieren. Über ein separat erhältliches 3D-Shield kann der uStepper auch als Drop-In zur Verbesserung der Positionierung in 3D-Druckern eingesetzt werden.
Technische Daten
| Mikrocontroller | ATmega328P (16 MHz clock speed) |
| Eingangsspannung | 8-30V |
| Logikspannung | 5V |
| Digitale Pins | 12 (6 PWM) |
| Analoge Pins | 4 |
| Schrittmotortreiber |
|
| Winkelencoder |
|
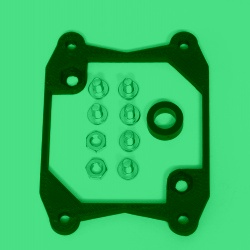
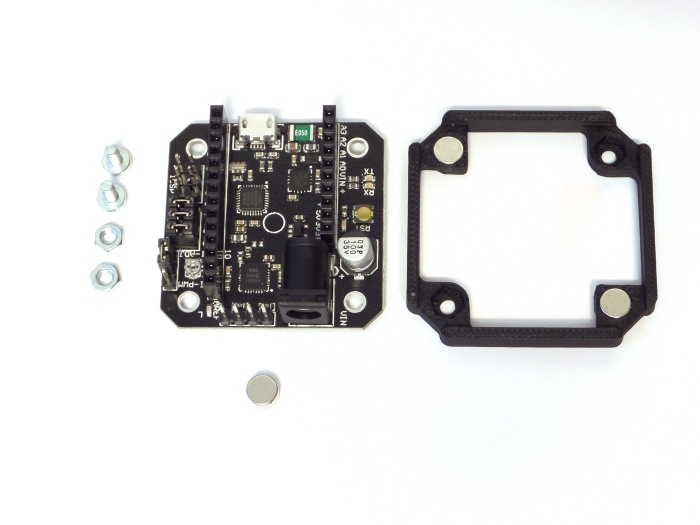
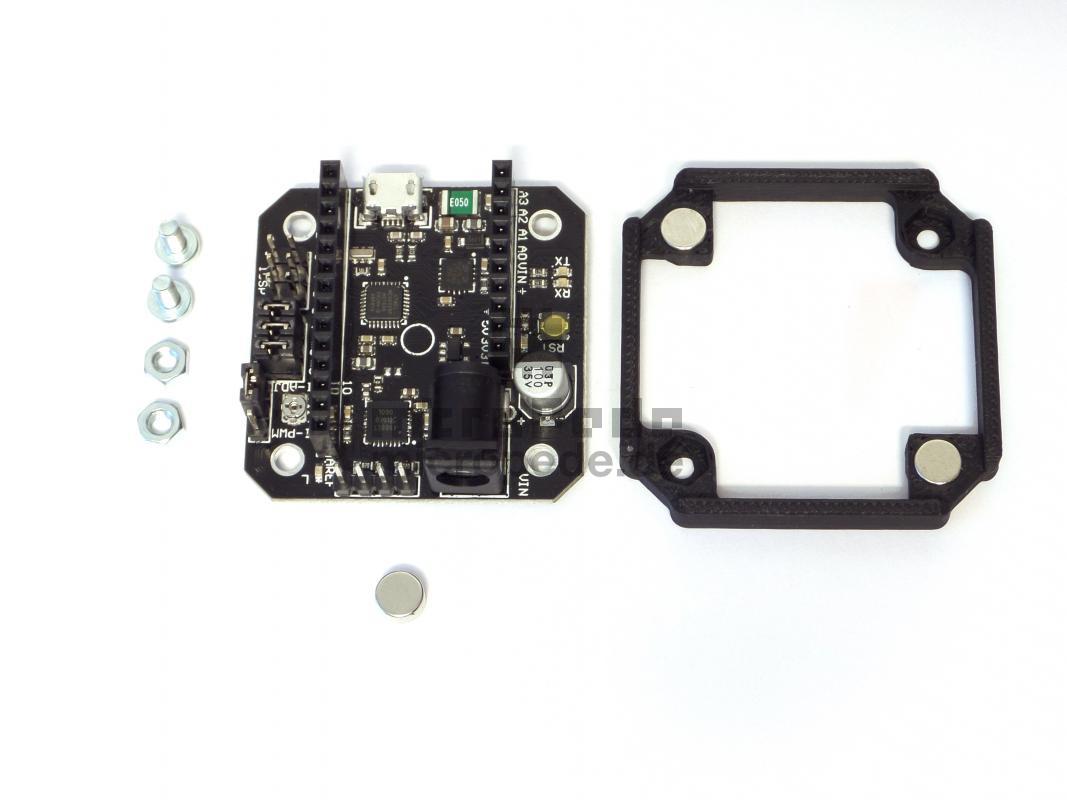
| Inhalt |
uStepper PCB (Hohlstecker) |
Encodermagnet |
2 Schrauben |
2 Muttern |
Halterung |

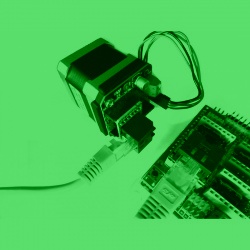
Die Videos zeigen Anwendungsbeispiele, die unter Umständen weitere Soft- und Hardwarekomponenten erfordern.